Map matching
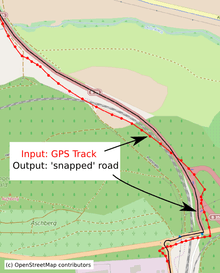
Map matching is the problem of how to match recorded geographic coordinates to a logical model of the real world, typically using some form of Geographic Information System. The most common approach is to take recorded, serial location points (eg. from GPS) and relate them to edges in an existing street graph (network), usually in a sorted list representing the travel of a user or vehicle. Matching observations to a logical model in this way has applications in satellite navigation, GPS tracking of freight, and transportation engineering.
Map matching algorithms can be divided in real-time and offline algorithms. Real-time algorithms associate the position during the recording process to the road network. Offline algorithms are used after the data is recorded and are then matched to the road network.[1] Real-time applications can only calculate based upon the points prior to a given time (as opposed to those of a whole journey), but are intended to be used in 'live' environments. This brings a compromise of performance over accuracy. Offline applications can consider all points and so can tolerate slower performance in favour of accuracy.
Examples and use cases
Uses for map-matching algorithms range from the immediate and practical, such as applications designed for guiding travellers, to the analytical, such as generating detailed inputs for traffic analysis models and the like.
Probably the most common use of map-matching is where a traveller has some mobile computer giving him or her directions across a street network. In order to give accurate directions, the device must know exactly where in the street network the user is. A GPS location has positional error though, so picking the nearest street segment and routing from there will likely not work. Instead, the history of locations reported by the GPS can be used to guess a plausible route and infer the current location more accurately.
Other uses, more analytical in nature, include:
- extracting traffic flow information from vehicle GPX tracks
- associating user-reported attributes with a street
- automatically infer turn restrictions based on an analysis of multiple GPS tracks
There are other examples [2] and this subject is still undergoing active research and development.[3][4][5]
Implementation
Map matching is implemented in a variety of programs, including the open source GraphHopper routing engine.[6] It is also included in a variety of proprietary programs and mapping/routing applications.
References
- ↑ Pereira, Francisco Câmara; Costa, Hugo; Pereira, Nuno Martinho (2009-09-11). "An off-line map-matching algorithm for incompletemap databases". Springer. Retrieved 2014-11-23.
- ↑ Brakatsoulas, Sotiris; Pfoser, Dieter; Wenk, Carola & Salas, Randall (September 2, 2005). "On Map-Matching Vehicle Tracking Data" (PowerPoint). Computer Technology Institute.
- ↑ Yin Lou; Chengyang Zhang; Yu Zheng; Xing Xie; Wei Wang & Yan Huang (November 4, 2009). "Map-Matching for Low-Sampling-Rate GPS Trajectories". Microsoft Research.
- ↑ Marchal; Hackney; Axhausen (July 2004). "Efficient map-matching of large GPS data sets - Tests on a speed monitoring experiment in Zurich" (PDF).
- ↑ Schuessler; Axhausen (October 2009). "Map-matching of GPS traces on high-resolution navigation networks using the Multiple Hypothesis Technique (MHT)" (PDF).
- ↑ "Map Matching Implementation in Java".