Quickhull
Main article: Convex hull algorithms
Quickhull is a method of computing the convex hull of a finite set of points in the plane. It uses a divide and conquer approach similar to that of quicksort, which its name derives from. Its average case complexity is considered to be O(n * log(n)), whereas in the worst case it takes O(n2) (quadratic).
This animation depicts the quickhull algorithm.
Algorithm
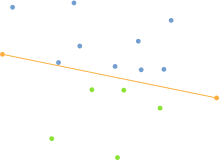
Steps 1-2: Divide points in two subsets
Under average circumstances the algorithm works quite well, but processing usually becomes slow in cases of high symmetry or points lying on the circumference of a circle. The algorithm can be broken down to the following steps:
- Find the points with minimum and maximum x coordinates, those are bound to be part of the convex hull.
- Use the line formed by the two points to divide the set in two subsets of points, which will be processed recursively.
- Determine the point, on one side of the line, with the maximum distance from the line. The two points found before along with this one form a triangle.
- The points lying inside of that triangle cannot be part of the convex hull and can therefore be ignored in the next steps.
- Repeat the previous two steps on the two lines formed by the triangle (not the initial line).
- Keep on doing so on until no more points are left, the recursion has come to an end and the points selected constitute the convex hull.
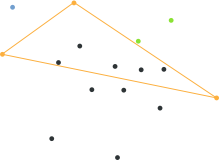
Steps 3-5: Find maximal distance point, ignore points inside triangle and repeat it
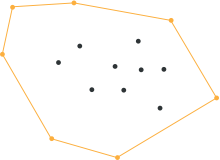
Step 6: Recurse until no more points are left
Pseudo Code
Input = a set S of n points
Assume that there are at least 2 points in the input set S of points
QuickHull (S)
{
// Find convex hull from the set S of n points
Convex Hull := {}
Find left and right most points, say A & B, and add A & B to convex hull
Segment AB divides the remaining (n-2) points into 2 groups S1 and S2
where S1 are points in S that are on the right side of the oriented line from A to B,
and S2 are points in S that are on the right side of the oriented line from B to A
FindHull (S1, A, B)
FindHull (S2, B, A)
}
FindHull (Sk, P, Q)
{
// Find points on convex hull from the set Sk of points
// that are on the right side of the oriented line from P to Q
If Sk has no point, then return.
From the given set of points in Sk, find farthest point, say C, from segment PQ
Add point C to convex hull at the location between P and Q
Three points P, Q, and C partition the remaining points of Sk into 3 subsets: S0, S1, and S2
where S0 are points inside triangle PCQ, S1 are points on the right side of the oriented
line from P to C, and S2 are points on the right side of the oriented line from C to Q.
FindHull(S1, P, C)
FindHull(S2, C, Q)
}
Output = convex hull
References
- Barber, C. Bradford; Dobkin, David P.; Huhdanpaa, Hannu (1 December 1996). "The quickhull algorithm for convex hulls" (PDF). ACM Transactions on Mathematical Software. 22 (4): 469–483. doi:10.1145/235815.235821.
- Dave Mount. "Lecture 3: More Convex Hull Algorithms".
- Pseudocode, "http://www.cse.yorku.ca/~aaw/Hang/quick_hull/Algorithm.html".
External links
- Implementing QuickHull (GDC 2014) – Algorithm presentation with 3D implementation details.
This article is issued from Wikipedia - version of the 11/11/2016. The text is available under the Creative Commons Attribution/Share Alike but additional terms may apply for the media files.