Machine olfaction
Machine olfaction is the automated simulation of the sense of smell. It is an emerging application of modern engineering where robots or other automated systems are needed to measure the existence of a particular chemical concentration in air. Such an apparatus is often called an electronic nose or e-nose. Machine olfaction is complicated by the fact that e-nose devices to date have had a limited number of elements, whereas each odor is produced by own unique set of (potentially numerous) odorant compounds. This technology is still in the early stages of development, but it promises many applications, such as:[1]
- quality assessment of beverage products
- quality control in food processing (e.g. taints, bacterial spoilage)
- detection and diagnosis in medicine e.g. in COPD.[2]
- detection of drugs, explosives and other dangerous or illegal substances
- military and law enforcement (e.g. chemical warfare agents)[3]
- disaster response (e.g. toxic industrial chemicals)
- environmental monitoring (e.g. pollutants)
Pattern analysis constitutes a critical building block in the development of gas sensor array instruments capable of detecting, identifying, and measuring volatile compounds, a technology that has been proposed as an artificial substitute for the human olfactory system. The successful design of a pattern analysis system for machine olfaction requires a careful consideration of the various issues involved in processing multivariate data: signal-preprocessing, feature extraction, feature selection, classification, regression, clustering, and validation.[4] As well, how to foretell or estimate the sensor response to aroma mixtures, is one of the problems in present research on machine olfaction devices.[5] Some pattern recognition problems in machine olfaction such as odor classification and odor localization can be solved by using time series kernel methods.[6]
Detection
There are three basic detection techniques using:
- Conductive-polymer odor sensors (polypyrrole)
- Tin-oxide gas sensors
- Quartz-crystal micro-balance sensor
They generally comprise; an array of sensors of some type; the electronics to interrogate those sensors and produce the digital signals, and finally; the data processing and user interface software.
The entire system being a means of converting complex sensor responses into an output that is a qualitative profile of the odor, volatile or complex mixture of chemical volatiles that make up a smell.
Conventional electronic noses are not analytical instruments in the classical sense and very few claim to be able to quantify an odor. These instruments are first 'trained' with the target odor and then used to 'recognize' smells so that future samples can be identified as 'good' or 'bad' smells.
Research into alternative methods for pattern recognition, for chemical sensor arrays, propose solutions to differentiate between artificial and biological olfaction related to dimensionality. This biologically inspired approach involves creating unique algorithms for information processing.[7]
Electronic noses have been demonstrated to discriminate between odors and volatiles from a wide range of sources. The list below shows just some of the typical applications for electronic nose technology – many are backed by research studies and published technical papers.
Odor localization
Motivation
Odor localization is the technique and process of finding the location of a volatile chemical source in a certain environment with one or several odor sensors. It is vital important for all the living beings on earth for both food searching and danger avoiding. As it is well known, odor is one of the basic senses like vision, hearing, taste and touch, with one difference that it is based on chemicals, which fills in our everyday life and poses great need for tracking and localization. However, detection of odor when compared with sound using propagation approaches, faces additional problems due to not only complexity of dynamic equations of odor, but also the unpredicted external disturbance, such as wind. Thus, different methods should be developed according to different applications and environmental conditions.
Application
Odor localization is still under development, but it poses great potential in many applications, such as: locating the source of dangerous substances in public places and other settings; discovering underground fuel/mine or gas leaking from pipes; detecting prohibited materials and drugs in a customs or airport; searching for survivors in earthquake, avalanches or other disaster circumstance; monitoring the environmental quality and early diagnosis of diseases in medical application.[8]
Problem statement and basics
The earliest work on the development of an instrument for specific odor detection can date back to 1961 by Moncrieff, which was a mechanical nose, while the first electronic nose was reported by Wikens and Hatman in 1964.[9] Larcome and Halsall discussed the use of robot for odor sensing in the nuclear industry in the early 1980s,[10] and research on odor localization was started in the early 1990s. Nowadays, odor localization has become a popular and fast growing field. Various sensors have been developed and a variety of algorithms have been proposed for diverse environments and conditions.
The task of odor localization can be divided into three different steps:
- search for the presence of a volatile chemical;
- search for the position of the source with an array of odor sensors and certain algorithms;
- identify the tracked odor source (odor recognition);
Localization methods
Odor localization methods are often classified according to odor dispersal modes in a range of environmental conditions, which can mainly be divided into two categories: diffusion-dominated fluid flow and turbulence-dominated fluid flow. Under each condition, different algorithms were developed for accurate odor localization.
Diffusion-dominated fluid flow
Under this category, the tracking and localization methods are designed for odor robots to operate in environment where the fluid motion is dominated by viscosity, which means that diffusion leads to the dispersal of odor flow, and the concentration of odor decreases from the source as a Gaussian distribution. These methods are most used in underground odor localization.[11]
The diffusion of chemical vapor through soil without external pressure gradient is often modeled by Fick's second law:

where D is the diffusion constant, d is distance in the diffusion direction, C is chemical concentration and t is time.
Assuming the chemical odor flow only disperses in a certain direction with uniform cross-section profile, the relationship of odor concentration at certain distance and certain time point between odor source concentrations is modeled as

where is the odor source concentration. This is the simplest dynamic equation in odor detection modeling, neglecting the external wind or other interruption. Under the diffusion dominated propagation model, different algorithms were developed by simply tracking the chemical concentration gradients to locate the odor source.

E. coli algorithm
A simple tracking method is the E. coli algorithm,[12] which has been observe in the chemotaxis process of E. coli bacteria. In this tracking process, odor concentration at each location is used as the state reading information by odor sensor. The odor robot can locate the source by simply comparing the concentration information of different locations. The odor robot will move along repeated straight lines with random direction. When the current state odor information is improved compared to the previous reading, the robot will continue the current straight path line. However, when the current state condition is worse than the previous one, the robot will turn around and move back for a while then move to another random direction. This method is simple and efficient; however, the length of path is highly variable and error occurs when coming close to the odor source.
Hex-Path algorithm and Dodecahedron algorithm
Another method based on the diffusion model is the Hex-Path algorithm, which has been developed by Russel[13] for underground chemical odor localization with a buried probe which can be controlled by a robotic manipulator.[14][15] In this method, the probe moves at certain depth along the edges of closely packed hexagonal grid. At each state junction (n), there are two paths (left and right) for choosing, and the robot will take the path that leads to higher concentration of the odor based on the previous two junction states odor concentration information (n-1, n-2). The Dodecahedron algorithm is the 3D version of the Hex-Path algorithm, in which the probe is moving in the path through the ground that corresponds to closely packed Dodecahedra, and in each state point, there are three possible path choices.
Turbulence-dominated fluid flow
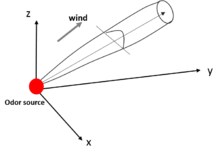
In this category, the localization methods are designed to deal with the background fluid (wind or water) flow as turbulence interruption. Most of the algorithms under this category are based on plume modeling (Figure 1).[16]
Plume dynamics are based on Gaussian models, which are based on Navier–Stokes equations. The simplified boundary condition of the Gaussian based model is:

where Dx and Dy are diffusion constants; is the linear wind velocity in the x direction, is the linear wind velocity in the y direction. Additionally assuming that the environment is uniform and the plume source is constant, the equation for odor detection in each robot sensor at each detection time point (t-th) is



where is the t-th sample of i-th sensor, is gain factor, is k-th source intensity, is the location of k-th source, is plume attenuation parameter, is background noise that satisfies . Under the plume modeling, different algorithms can be used to localize the odor source.






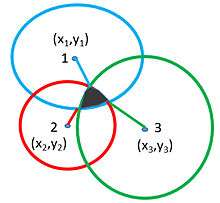
Triangulation algorithm
A simple algorithm that can be used for location estimation is the triangulation method (Figure 2). Consider the odor detection equation above, the position of odor source can be estimated by organizing sensor distances on one side of the equation and ignoring the noise. The source position can be estimated using the following equations:



Least square method (LSM)
The least square method (LSM) is a slightly complicated algorithm for odor localization. The LSM version of the odor tracking model is given by:

where is the Euclidean distance between the sensor node and the plume source, calculating by:


The main difference between LSM algorithm and the direct triangulation method is the noise. In LSM, noise is considered and the odor source location is being estimated by minimizing the squared error. The nonlinear least square problem is given by:

where is the estimated source location and is the average of multiple measurements at the sensors, calculating by:



Maximum likelihood estimation (MLE)
Another method based on plume modeling is maximum likelihood estimation (MLE). In this odor localization method, several matrices are defined as follows:
![{\displaystyle Z=[{\frac {R_{1}-\mu _{1}}{\sigma _{1}}},{\frac {R_{2}-\mu _{2}}{\sigma _{2}}},...{\frac {R_{N}-\mu _{N}}{\sigma _{N}}}]}](../I/m/cd5e365504e8acb95fd65d9da0849d8fd86b53f5.svg)
![{\displaystyle G=diag[{\frac {\gamma _{1}}{\sigma _{1}}},{\frac {\gamma _{2}}{\sigma _{2}}},...{\frac {\gamma _{N}}{\sigma _{N}}}]}](../I/m/8223dad3dae108b8f0ff13d99944f03b42dd17a4.svg)
![{\displaystyle D=[{\frac {1}{d_{1}^{2}}},{\frac {1}{d_{1}^{2}}},...{\frac {1}{d_{N}^{2}}}]}](../I/m/9fd06aa1520f7cd4f6678c16bfe319fab9146656.svg)
![{\displaystyle \zeta =[\zeta _{1},\zeta _{2},...\zeta _{N}]}](../I/m/f54def9ab385afd74efefb490f0a038c45cc8ae5.svg)


With these matrices, the plume based odor detection model can be expressed as the following equation:

Then, the Maximum Likelihood Estimation can be applied to the modeling and form the probability density function

where is the estimated odor source position, and the log likelihood function is


The maximum likelihood parameter estimation of can be calculated by minimizing

and the accurate position of the odor source can be estimated by solving:

Odor localization is a combination of quantitative analysis of chemical odor and path searching algorithms, and the environmental condition plays a vital role in the localization quality. Different methods should be developed according to the real conditions for better application of this technique in reality.
See also
References
- ↑ Sensors Council. (2012). Special issue on Machine Olfaction. IEEE SENSORS JOURNAL, 11(12), 3486-3486 . Retrieved March 20, 2012, from the Scholars Portal Journal database.
- ↑ Geffen, Wouter H. van; Bruins, Marcel; Kerstjens, Huib A. M. (2016-01-01). "Diagnosing viral and bacterial respiratory infections in acute COPD exacerbations by an electronic nose: a pilot study". Journal of Breath Research. 10 (3): 036001. doi:10.1088/1752-7155/10/3/036001. ISSN 1752-7163.
- ↑ Stassen, I.; Bueken, B.; Reinsch, H.; Oudenhoven, J. F. M.; Wouters, D.; Hajek, J.; Van Speybroeck, V.; Stock, N.; Vereecken, P. M.; Van Schaijk, R.; De Vos, D.; Ameloot, R. "Towards metal–organic framework based field effect chemical sensors: UiO-66-NH2 for nerve agent detection". Chem. Sci. doi:10.1039/C6SC00987E.
- ↑ Sensors Council. (2002). Pattern analysis for machine olfaction: a review . IEEE SENSORS JOURNAL, 2(3), 189-202 . Retrieved March 20, 2012, from the Scholars Portal database.
- ↑ Phaisangittisagul, E., & Nagle, H. T. (2011). Predicting odor mixture's responses on machine olfaction sensors. Sensors & Actuators: B. Chemical, 155(2), 473-482
- ↑ Vembu, S.;Vergara, A.;Muezzinoglu, M. K.;Huerta, R. (2012). On time series features and kernels for machine olfaction. Sensors &Actuators: B. Chemical,174, 535
- ↑ Baranidharan Raman,"Sensor-based Machine Olfaction with Neuromorphic Models of the Olfactory System", University of Madras, India; M.S., Texas A&M University, December 2005
- ↑ "Review on: Odor Localization Robot Aspect and Obstacles". www.academia.edu. Retrieved 2015-11-12.
- ↑ Gardner, Julian W.; Bartlett, Philip N. (1994-03-01). "A brief history of electronic noses". Sensors and Actuators B: Chemical. 18 (1–3): 210–211. doi:10.1016/0925-4005(94)87085-3.
- ↑ Robotics in nuclear engineering: computer-assisted teleoperation in hazardous environments with particular reference to radiation fields.
- ↑ Kowadlo, Gideon; Russell, R. Andrew (2008-08-01). "Robot Odor Localization: A Taxonomy and Survey". The International Journal of Robotics Research. 27 (8): 869–894. doi:10.1177/0278364908095118. ISSN 0278-3649.
- ↑ Russell, R. Andrew (2004-01-01). "Robotic location of underground chemical sources". Robotica. 22 (01): 109–115. doi:10.1017/S026357470300540X. ISSN 1469-8668.
- ↑ Russell, R. Andrew (2004-01-01). "Robotic location of underground chemical sources". Robotica. 22 (01): 109–115. doi:10.1017/S026357470300540X. ISSN 1469-8668.
- ↑ Russell, R. Andrew (2004-01-01). "Robotic location of underground chemical sources". Robotica. 22 (01): 109–115. doi:10.1017/S026357470300540X. ISSN 1469-8668.
- ↑ "Chemical Source Location and the RoboMole Project" (PDF).
- ↑ "Survey: Odor Source Localization" (PDF).
External links
- Electronic Nose Technologies from Scensive Technologies Ltd, UK
- T. C. Pearce, S. S. Schiffman, H. T. Nagle, J. W. Gardner (editors), Handbook of Machine Olfaction: Electronic Nose Technology, Wiley-VCH, Weinheim, 2002. In PDF at:
- Network on artificial Olfactory Sensing (NOSE) Archive
- Artificial noses -- picture the smell, nature.com